Een sensor in algemene zin is een apparaat dat de ene fysieke hoeveelheid omzet in een andere, handig voor verwerking, verzending of daaropvolgende conversie. In de regel is de eerste grootheid fysiek, niet vatbaar voor directe meting (temperatuur, snelheid, verplaatsing, enz.), En de tweede is een elektrisch of optisch signaal. Een niche op het gebied van meetinstrumenten wordt ingenomen door sensoren, waarvan het belangrijkste element een inductor is.
Inhoud
Hoe de inductiesensor werkt en hoe deze werkt
Volgens het werkingsprincipe zijn inductieve sensoren actief, dat wil zeggen dat ze een externe generator nodig hebben om te werken. Het levert een signaal met een bepaalde frequentie en amplitude aan de inductor.
De stroom die door de windingen van de spoel gaat, creëert een magnetisch veld. Als een geleidend object in het magnetische veld komt, veranderen de parameters van de spoel.Het blijft alleen om deze wijziging op te lossen.
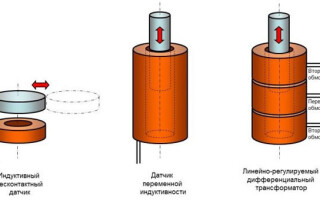
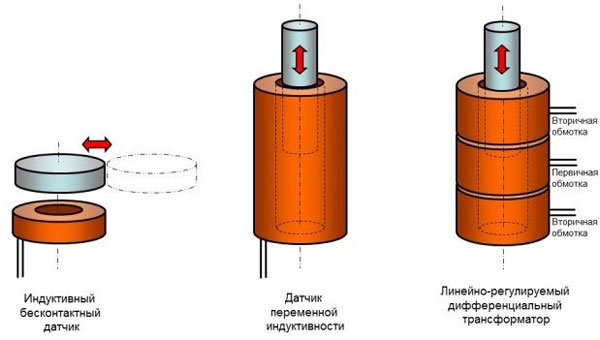
Eenvoudige contactloze sensoren reageren op het verschijnen van metalen voorwerpen in de nabije zone van de wikkeling. Dit verandert de impedantie van de spoel, deze verandering moet worden omgezet in een elektrisch signaal, versterken en (of) de doorgang van de drempel fixeren met behulp van een vergelijkingsschakeling.
Sensoren van een ander type reageren op veranderingen in de lengtepositie van het object dat als kern van de spoel dient. Wanneer de positie van het object verandert, beweegt het in of uit de spoel, waardoor de inductantie verandert. Deze verandering kan worden omgezet in een elektrisch signaal en gemeten. Een andere versie van zo'n sensor is wanneer een object de spoel van buitenaf nadert. Dit zorgt ervoor dat de inductantie afneemt als gevolg van het grondeffect.
Een andere versie van de inductieve verplaatsingssensor is een lineair instelbare differentiële transformator (LVDT). Het is een samengestelde spoel, gemaakt in de volgende volgorde:
- secundaire wikkeling 1;
- Primaire wikkeling;
- secundaire wikkeling 2.
Het signaal van de generator wordt naar de primaire wikkeling gevoerd. Het magnetische veld gecreëerd door de middelste spoel induceert een EMF in elk van de secundaire (transformator principe:). Wanneer de kern beweegt, verandert de onderlinge verbinding tussen de spoelen, waardoor de elektromotorische kracht in elk van de wikkelingen verandert. Deze verandering kan worden vastgesteld door het meetcircuit. Omdat de lengte van de kern kleiner is dan de totale lengte van de samengestelde spoel, kan de positie van het object ondubbelzinnig worden bepaald door de EMF-verhouding in de secundaire wikkelingen.
Op hetzelfde principe - een verandering in de inductieve koppeling tussen de wikkelingen - wordt een draaisensor gebouwd.Het bestaat uit twee coaxiale spoelen. Het signaal wordt toegevoerd aan een van de wikkelingen, de EMF in de tweede is afhankelijk van de onderlinge rotatiehoek.
Uit het werkingsprincipe is het duidelijk dat inductieve sensoren, ongeacht het ontwerp, contactloos zijn. Ze werken op afstand en hebben geen direct contact met het bestuurde object nodig.
Voor- en nadelen van inductieve sensoren
De voordelen van sensoren van het inductieve type omvatten voornamelijk:
- ontwerp betrouwbaarheid;
- gebrek aan contactverbindingen;
- hoog uitgangsvermogen, wat de invloed van ruis vermindert en het regelcircuit vereenvoudigt;
- hoge gevoeligheid;
- het vermogen om te werken vanuit bronnen van wisselspanning van industriële frequentie.
Het belangrijkste nadeel van sensoren van het inductieve type is hun grootte, gewicht en fabricagecomplexiteit. Voor het wikkelen van spoelen met de gegeven parameters is speciale apparatuur vereist. Ook wordt de noodzaak om de amplitude van het signaal van de hoofdoscillator nauwkeurig te handhaven als een minpunt beschouwd. Wanneer het verandert, verandert ook het gevoeligheidsgebied. Omdat de sensoren alleen op wisselstroom werken, wordt het handhaven van de amplitude een bepaald technisch probleem. Direct (of via een step-down transformator) is het niet mogelijk om de sensor aan te sluiten op een huishoudelijk of industrieel netwerk - daarin kunnen spanningsschommelingen in amplitude of frequentie zelfs 10% bereiken in de normale modus, wat de meetnauwkeurigheid onaanvaardbaar maakt .
Ook kan de meetnauwkeurigheid worden beïnvloed door:
- magnetische velden van derden (afscherming van de sensor is onmogelijk op basis van het werkingsprincipe);
- EMF-pickups van derden in voedings- en meetkabels;
- fabricagefouten;
- sensor karakteristieke fout;
- spelingen of vervormingen op de plaats van installatie van de sensor die de algehele prestaties niet beïnvloeden;
- afhankelijkheid van nauwkeurigheid van temperatuur (de parameters van de wikkeldraad veranderen, inclusief de weerstand).
Het onvermogen van inductiesensoren om te reageren op het verschijnen van diëlektrische objecten in hun magnetische veld kan worden toegeschreven aan zowel voor- als nadelen. Enerzijds beperkt dit de reikwijdte van hun toepassing. Anderzijds maakt het hem ongevoelig voor de aanwezigheid van vuil, vet, zand, enz. op de bewaakte objecten.
Kennis van de tekortkomingen en mogelijke beperkingen in de werking van inductieve sensoren maakt een rationeel gebruik van hun voordelen mogelijk.
Omvang van inductieve sensoren
Inductieve naderingssensoren worden vaak gebruikt als eindschakelaars. Dergelijke apparaten zijn wijdverbreid:
- in beveiligingssystemen, als sensoren voor het ongeoorloofd openen van ramen en deuren;
- in telemechanica-systemen, als sensoren van de uiteindelijke positie van eenheden en mechanismen;
- in het dagelijks leven in de schema's voor het aangeven van de gesloten positie van deuren, luiken;
- voor het tellen van objecten (bijvoorbeeld bewegen langs de lopende band);
- om de rotatiesnelheid van de tandwielen te bepalen (elke tand, die langs de sensor gaat, creëert een impuls);
- in andere situaties.

Hoek-encoders kunnen worden gebruikt om de rotatiehoeken van assen, tandwielen en andere roterende componenten te bepalen, evenals absolute encoders. Dergelijke apparaten kunnen ook worden gebruikt in werktuigmachines en robotapparaten, samen met lineaire positiesensoren. Waar je precies de positie van de knooppunten van de mechanismen moet weten.
Praktijkvoorbeelden van de implementatie van inductieve sensoren
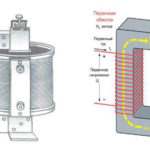
In de praktijk kunnen de ontwerpen van inductieve sensoren op verschillende manieren worden geïmplementeerd. De eenvoudigste uitvoering en opname is voor een tweedraads enkele sensor, die de aanwezigheid van metalen voorwerpen in de gevoeligheidszone bewaakt. Dergelijke apparaten worden vaak gemaakt op basis van een E-vormige kern, maar dit is geen fundamenteel punt. Een dergelijke implementatie is gemakkelijker te vervaardigen.
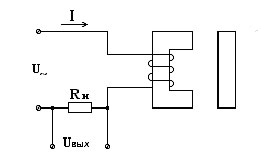
Wanneer de spoelweerstand verandert, veranderen de stroom in het circuit en de spanningsval over de belasting. Deze wijzigingen kunnen worden vastgelegd. Het probleem is dat de belastingsweerstand kritisch wordt. Als het te groot is, zullen de veranderingen in stroom wanneer een metalen voorwerp verschijnt relatief klein zijn. Dit vermindert de gevoeligheid en ruisimmuniteit van het systeem. Als het klein is, zal de stroom in het circuit groot zijn, een meer resistente sensor is vereist.
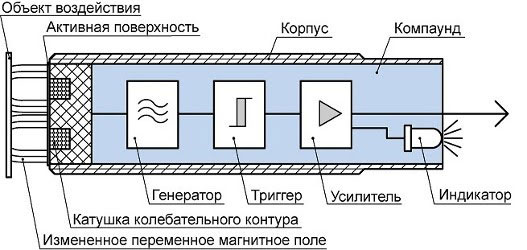
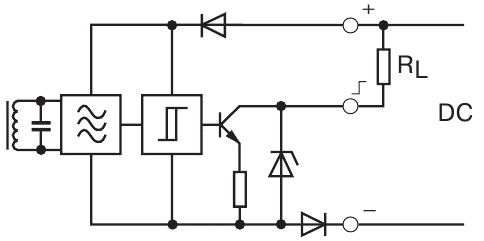
Daarom zijn er uitvoeringen waarbij het meetcircuit in de sensorbehuizing is ingebouwd. De generator genereert pulsen die de spoel voeden. Wanneer een bepaald niveau is bereikt, gaat de trekker af en gaat van toestand 0 naar 1 of omgekeerd. De bufferversterker versterkt het signaal in termen van vermogen en (of) spanning, verlicht (dooft) de LED en voert een discreet signaal uit naar het externe circuit.
Het uitgangssignaal kan worden gevormd:
- door elektromagnetische of Solid state relais – nul of één spanningsniveau;
- "droog contact" elektromagnetisch relais:;
- open verzamelaar transistor (structuren n-p-n of p-n-p).
In dit geval zijn er drie draden nodig om de sensor aan te sluiten:
- voedsel;
- gemeenschappelijke draad (0 volt);
- signaal draad.
Dergelijke sensoren kunnen ook worden gevoed door gelijkspanning. Pulsen tot de inductie ze worden gevormd door middel van een interne generator.
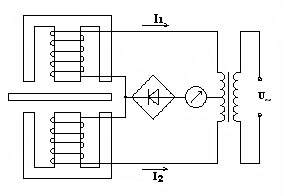
Differentiële encoders worden gebruikt voor positiebewaking. Als het bestuurde object symmetrisch is ten opzichte van beide spoelen, is de stroom erdoorheen hetzelfde. Wanneer een wikkeling naar het veld wordt verschoven, treedt er een onbalans op, de totale stroom is niet langer gelijk aan nul, wat kan worden geregistreerd door een indicator met een pijl in het midden van de schaal. De indicator kan worden gebruikt om zowel de grootte van de verschuiving als de richting ervan te bepalen. In plaats van een aanwijsapparaat kunt u een besturingsschema gebruiken dat, bij ontvangst van informatie over een positieverandering, een signaal afgeeft, maatregelen neemt om het object uit te lijnen, aanpassingen aan het technologische proces maakt, enz.

Sensoren gemaakt volgens het principe van lineair instelbare differentiële transformatoren worden geproduceerd in de vorm van complete structuren, die een frame zijn met primaire en secundaire wikkelingen en een staaf die naar binnen beweegt (deze kan veerbelast zijn). Er worden draden naar buiten gebracht om een signaal van de generator te sturen en de EMF van de secundaire wikkelingen te verwijderen. Een bestuurd object kan mechanisch aan de staaf worden bevestigd. Het kan ook worden gemaakt van een diëlektricum - alleen de positie van de steel is van belang voor de meting.
Ondanks bepaalde inherente tekortkomingen, sluit de inductieve sensor veel gebieden af die verband houden met contactloze detectie van objecten in de ruimte.Ondanks de constante ontwikkeling van technologie, zal dit type apparaat in de nabije toekomst de markt voor meetapparatuur niet verlaten, omdat de werking ervan gebaseerd is op de fundamentele wetten van de fysica.
Vergelijkbare artikelen: